
























計算ウィザード
最小距離(安全距離)に関する基本原則
セーフティライトカーテンやセーフティレーザスキャナなどの感電保護装置は、操作点への人の接近を検出します。それらは操作点へのアクセスを妨げるものではありませんが、操作点から十分な距離から、適切なタイミングで危険を無効にする必要があります。例えば、動きを停止させます。最小距離は、ISO 13855に従って以下のように計算されます。
SRT [mm] = K [mm/ms] * T [ms] + CRT [mm]
SRT – 保護領域と動作点間の最小距離 [mm]
K – 接近速度:上肢による接近:2.0mm/ms/進入: 1.6 mm/ms
T – 該当部位が保護領域に入ってからのセーフティ機能停止時間 [ms]
CRT – 保護装置の検出能力による一定の追加距離 [mm]
したがって、感電保護装置の最小距離は、一定の部品(C)と動的な部品(K x T)から決まります。感電保護装置も手を伸ばせば回避できるため、ガードと同様、保護領域の必要な高さをテーブルから決定する必要があります。したがって、動作点までの必要な距離は、次の2つの値のうち大きい方に相当します。
- SRT(リーチスルー)、保護領域を通る接近に基づいて計算
- SRO (リーチオーバー)、CROは保護領域の上端の高さと動作点の高さから
全停止時間Tは、測定によってのみ十分な精度で決定することができます。この目的のために、特別な停止時間測定装置が使用されます。停止時間計測はロイツェのサービスです。法的要件により、停止時間計測を含む安全検査は適格者のみが実施できます。
ISO標準に準拠した最小距離(安全距離)計算ウィザード
このウィザードの推奨は完全なものではありません。安全に関する製品の正しい使用と取り付けを確実にするためには、それぞれの規格と規則の最新版を遵守することが不可欠です。Leuze electronic GmbH + Co. KGは、このウィザードの使用から生じる損害、または一般的に適用される規格および指令の正確さについて、一切の責任を負いません。
垂直接近、分解能40 mm以下の最小距離(安全距離)の計算(ISO 13855)
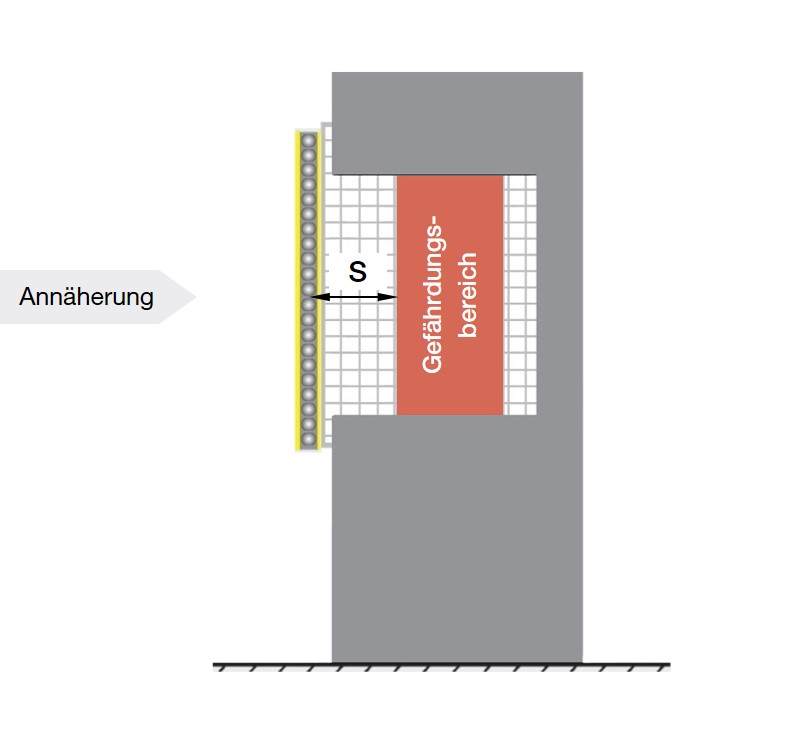 | 最小距離 SRT は以下の式で計算されます: SRT: 保護領域と動作点間の最小距離 |
最初に、K には 2.0 mm/ms の値が使用されます。計算の結果、 SRT > 500 mm になった場合は、K = 1.6 mm/ms で計算を繰り返すことができます。2 番目のステップでの SRTの結果は少なくとも 500 mm である必要があります (計算値が低い場合、SRT は 500 mm に設定されます)。
注意:動作点までの距離Sは、たとえ低い値が計算されていたとしても、常に少なくとも100 mmでなければなりません。
垂直接近で分解能40mm以上の最小距離(安全距離)の計算(ISO 13855)
注:この式は、マルチライトビーム・セーフティライトバリア、セーフティライトカーテン、セーフティレーザスキャナに適用されます。
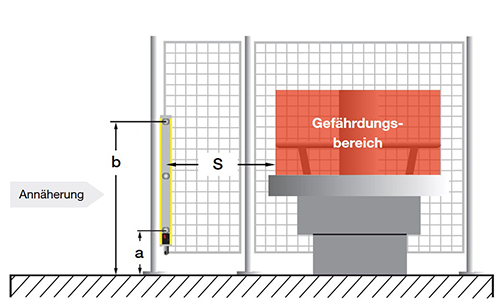 | 最小距離 SRT は以下の式で計算されます: SRT: 保護領域と動作点間の最小距離 |
S: 最小距離
a: 基準面からの下ビームの高さ
b: 基準面からの上ビームの高さ
注: CRO(リーチオーバー)のテーブル値も決定する必要があります。これは通常850mm以上です!
|
|
| |||||||||||
| 危険エリアの高さ |
電気反応性保護装置の保護領域の上端の高さ | |||||||||||
| 900 | 1000 | 1100 | 1200 | 1300 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2600 | |
|
危険エリアまでの追加距離 CRO | ||||||||||||
| 2600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2500 | 400 | 400 | 350 | 300 | 300 | 300 | 300 | 300 | 250 | 150 | 100 | 0 |
| 2400 | 550 | 550 | 550 | 500 | 450 | 450 | 400 | 400 | 300 | 250 | 100 | 0 |
| 2200 | 800 | 750 | 750 | 700 | 650 | 650 | 600 | 550 | 400 | 250 | 0 | 0 |
| 2000 | 950 | 950 | 850 | 850 | 800 | 750 | 700 | 550 | 400 | 0 | 0 | 0 |
| 1800 | 1100 | 1100 | 950 | 950 | 850 | 800 | 750 | 550 | 0 | 0 | 0 | 0 |
| 1600 | 1150 | 1150 | 1100 | 1000 | 900 | 850 | 750 | 450 | 0 | 0 | 0 | 0 |
| 1400 | 1200 | 1200 | 1100 | 1000 | 900 | 850 | 650 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1200 | 1200 | 1100 | 1000 | 850 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1200 | 1150 | 1050 | 950 | 750 | 700 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1150 | 1050 | 950 | 800 | 500 | 450 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1050 | 950 | 750 | 550 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 900 | 700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
セーフティレーザスキャナを用いた並列接近によるエリア警戒の最小距離(安全距離)の計算(ISO 13855)
 | 最小距離SRTは以下の式で計算されます: S: 危険エリアと検出ポイントの最小距離 C: = 1200 mm - 0.4 * H Z: セーフティレーザスキャナによるさらなる距離延長 |
セーフティレーザスキャナの場合、IEC 61496-3 では追加の距離を考慮する必要があると述べています:
- ZSM 測定誤差の補正のため。この値は機器によって異なり、それぞれの取扱説明書に記載されています。ロイツェRSL 400セーフティレーザスキャナの場合、保護領域半径≤6.25 mではZSM100 mm、保護領域半径>6.25 mではZSM120 mmが適用されます。
- ZREFL: 保護領域の境界を超えたビーム面では、リフレクタの使用を避けてください。これが不可能な場合は、100 mm の距離 ZREFLを追加する必要があります。
自動搬送車使用に関する注意事項:
ISO 3691-4「産業車両-安全要求事項及び検証-第4部:無人産業車両及びシステム」に従い、保護装置のテストは、車両に指定されたパラメータと組み合わせて、最も不利な条件(例:荷重、輸送経路の傾斜)も考慮しなければなりません。このような要求の結果、保護領域のサイズが大きくなる可能性があります。
セーフティライトカーテンを使用した並行侵入による範囲警戒の最小距離(安全距離)の計算 (ISO 13855)
 | 最小距離SRTは以下の式で計算されます: S: 危険エリアと検出ポイントの最小距離 C: 保護装置が作動する前に危険ゾーンへの侵入を考慮するための安全関連の定数。 C= 1200 mm - 0.4 * H, CMin = 850 mm H: 基準面からの保護領域の高さ 取り付け高さHに必要な分解能d: 注:300mmを超える高さは、人が這うことが可能な高さと見なされます。 |
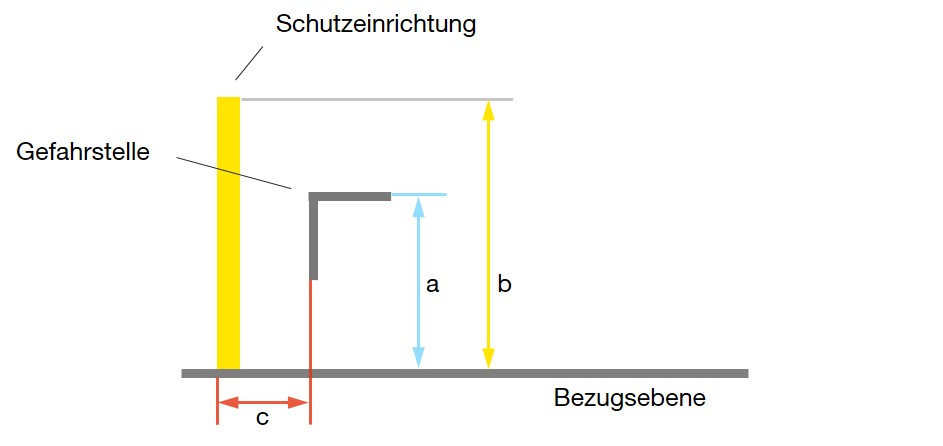
以下の表は、ISO13857に従って、危険度の高い用途に必要な固定ガードの高さを決定するために使用されます。
| 与えられる値は次のとおりです:
決定される値は次のとおりです:
|  |
|
|
| |||||||||
| 危険エリアの高さ (a) |
保護構造の高さ (b) | |||||||||
| 1000 | 1200 | 1400 | 1600 | 1800 | 2000 | 2200 | 2400 | 2500 | 2700 | |
|
危険エリアまでの水平安全距離 (c) | ||||||||||
| 2700 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2600 | 900 | 800 | 700 | 600 | 600 | 500 | 400 | 300 | 100 | 0 |
| 2400 | 1100 | 1000 | 900 | 800 | 700 | 600 | 400 | 300 | 100 | 0 |
| 2200 | 1300 | 1200 | 1000 | 900 | 800 | 600 | 400 | 300 | 0 | 0 |
| 2000 | 1400 | 1300 | 1100 | 900 | 800 | 600 | 400 | 0 | 0 | 0 |
| 1800 | 1500 | 1400 | 1100 | 900 | 800 | 600 | 0 | 0 | 0 | 0 |
| 1600 | 1500 | 1400 | 1100 | 900 | 800 | 500 | 0 | 0 | 0 | 0 |
| 1400 | 1500 | 1400 | 1100 | 900 | 800 | 0 | 0 | 0 | 0 | 0 |
| 1200 | 1500 | 1400 | 1100 | 900 | 700 | 0 | 0 | 0 | 0 | 0 |
| 1000 | 1500 | 1400 | 1000 | 800 | 0 | 0 | 0 | 0 | 0 | 0 |
| 800 | 1500 | 1300 | 900 | 600 | 0 | 0 | 0 | 0 | 0 | 0 |
| 600 | 1400 | 1300 | 800 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 400 | 1400 | 1200 | 400 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 200 | 1200 | 900 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 1100 | 500 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
高さが1000mm以下の障害物は、動きを十分に制限できないため、含まれません。
1400mm以下の障害物は、乗り越えやすいため、安全対策を講じずに使用しないでください。
ISO 13854は、人の身体の部位に応じて、2つの可動機械部品間、または1つの可動機械部品と1つの固定機械部品間の最小距離を規定しています。機械の設計時にこれらの距離を維持できるのであれば、破砕リスクに関してこれ以上の保護措置は必要なく、このサイズの開口部は本質的に安全であると考えることができます。
以下のアクセスに必要な最小距離:
| 指 | 手 | 腕 | つま先 | 足 | 脚 | 頭 | 胴体 |
| 25 mm | 100 mm | 120 mm | 50 mm | 120 mm | 180 mm | 300 mm | 500 mm |
デザイン上の理由でこれらの距離が守れない場合は、侵入防止柵や感電保護装置などの技術的手段を追加して、侵入を防止したり、危険な動作を速やかに停止できるようにしなければなりません。侵入防止柵は、操作点から最小距離離して取り付けられて初めて保護機能を果たします。
ISO 13857に従って侵入防止柵を使用する場合、安全距離の固定値を決定する際には以下の点を考慮しなければなりません:
- 開口部の大きさと貫通深さ - 表に示す身体の部位に応じた安全距離
- リーチオーバー - 表に示された動作点の距離と高さに応じた保護装置の高さ
- クロールアンダー - 侵入防止柵下の隙間≤180 mm